








产品特点
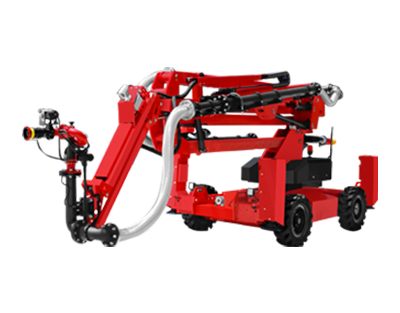
◆ 机器人配备6自由度排爆机械臂,实现任意方向的抓取
◆ 前视、云台、机械爪(上、下)四处影像,360°侦察周围环境
◆ 机械臂可抓举重物
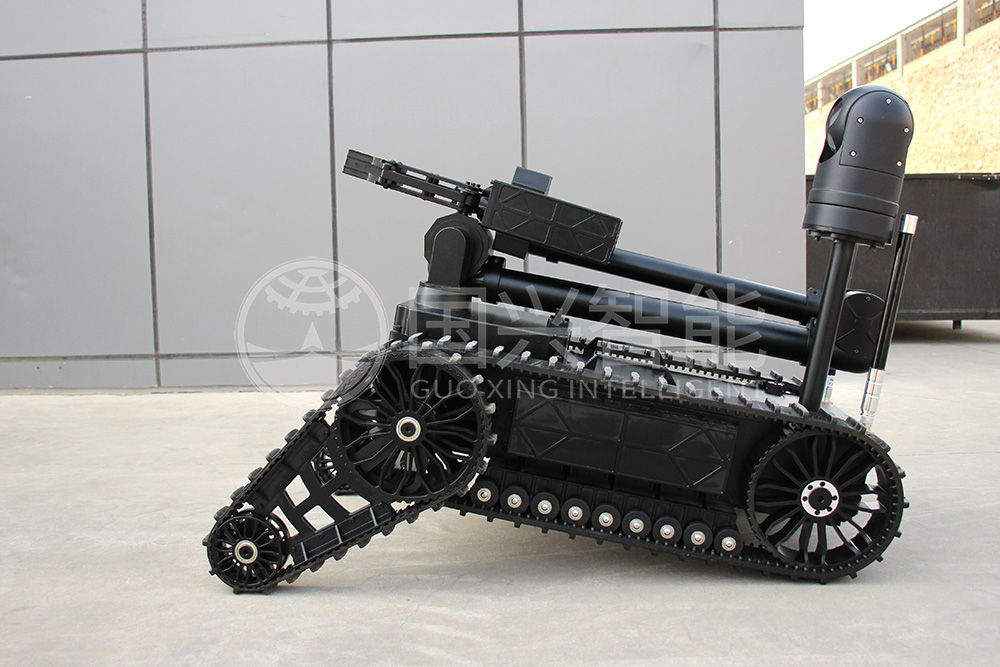
◆ 前摆臂+履带+后辅轮的结构形式,可轻松翻越各种复杂地形
◆ 配备无线、有线控制两种控制模式,提升设备在干扰情况下的兼容性
◆ 机器人携带轻便,可快速部署作战及工作

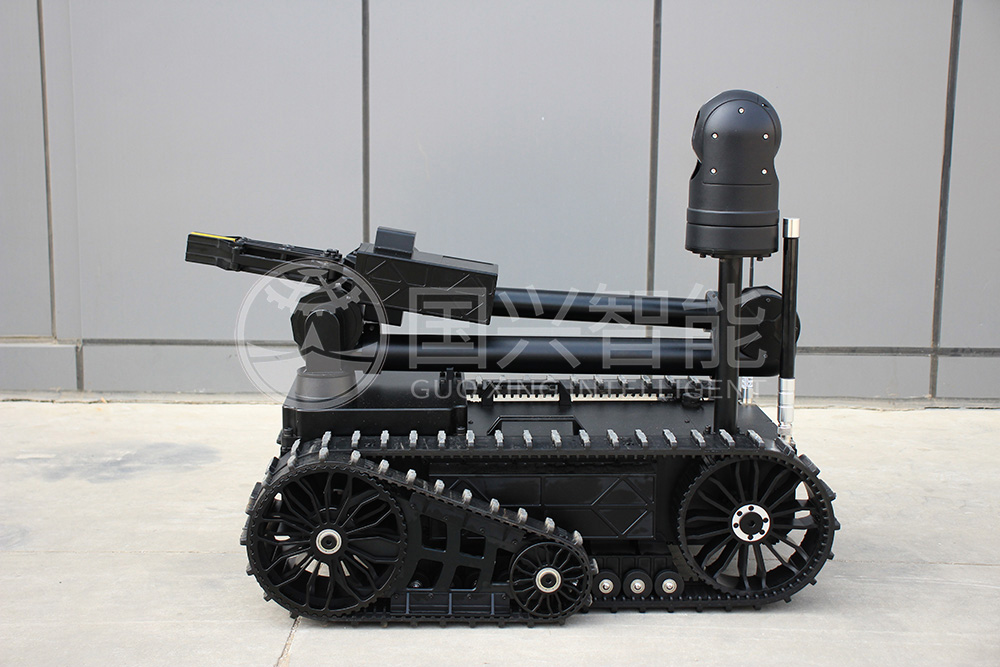
◆ 机器人配备6自由度排爆机械臂,实现任意方向的抓取
◆ 前视、云台、机械爪(上、下)四处影像,360°侦察周围环境
◆ 机械臂可抓举重物
◆ 前摆臂+履带+后辅轮的结构形式,可轻松翻越各种复杂地形
◆ 配备无线、有线控制两种控制模式,提升设备在干扰情况下的兼容性
◆ 机器人携带轻便,可快速部署作战及工作