



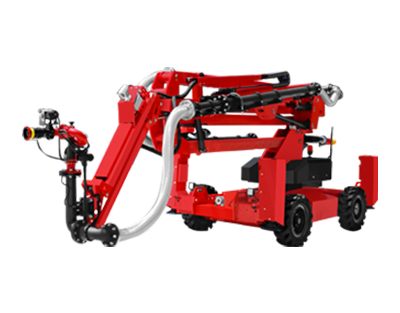



产品特点
◆ 机器人底盘采用防水设计。外置电气元件也采用防水设计。
◆ 动力控制系统采用低压直流无刷控制系统,闭环控制,可实现灵活控制和定位,满足客户的操控要求。
◆ 机动性强,重心位置低,具有优越的越障和爬坡能力;转弯半径小,移动灵活、速度快,且速度可调。
◆ 行走部分采用橡胶履带,具有接地比压小、附着条件好、路面适应能力强、维护方便等的特点。
◆ 底盘结构刚度高,布局紧凑合理。
技术参数
| 折叠尺寸 | 995*730*635mm |
| 展开尺寸 | 1620*730*315mm |
| 底盘自重 | 122kg |
| 负载重量 | 60kg |
| 最大越障 | 350mm |
| 额定功率 | 1000W*2 |
| 运行速度 | 0~2.2m/s |
| 最大爬坡 | 空载35度 |
| 结构形式 | 四支臂结构 |
| 电机选用 | 24V直流无刷电机 |
| 车身材质 | 不锈钢板 |
| 履带材质 | 橡胶+纤维 |
应用案例
-
PS1000摆臂底盘案例